Vũ Nguyễn
Writer
Khi chúng ta nghĩ đến máy bay không người lái, hình ảnh chúng bay tự do trên bầu trời rộng lớn thường hiện lên trong đầu chúng ta. Tuy nhiên, có một khu vực đặc biệt đang chờ máy bay không người lái khám phá: những đường hầm sâu và bí ẩn. Trong đường hầm, tín hiệu vệ tinh bị chặn và các phương pháp định vị truyền thống mất tác dụng. Điều này giống như để máy bay không người lái lạc đường trong bóng tối. Nhưng sức mạnh của công nghệ rất mạnh mẽ. Công nghệ dẫn đường tự động không cần vệ tinh của máy bay không người lái trong đường hầm cũng giống như trang bị cho máy bay không người lái một đôi “đôi cánh” công nghệ có thể di chuyển trong bóng tối.

Cảnh quay từ máy bay không người lái về một đường hầm nổi lên từ một ngọn núi và những chiếc ô tô chạy qua đó.
Đường hầm là những lối đi ngầm được con người tạo ra để vượt qua các chướng ngại vật, nhưng đối với máy bay không người lái, chúng là một môi trường đầy thách thức. Trước hết, ánh sáng cực kỳ thiếu và bóng tối bao trùm từng inch không gian, khiến các cảm biến thị giác dựa vào ánh sáng gần như bị "mù" thứ hai, cấu trúc bên trong của đường hầm rất phức tạp, với không gian hẹp, lối đi cong và nhiều chướng ngại vật khác nhau, chẳng hạn như giá đỡ, dây cáp, v.v., đã gây trở ngại rất lớn cho chuyến bay của máy bay không người lái, điều quan trọng nhất là thiếu tín hiệu vệ tinh, dường như đã cắt đứt “kết nối” giữa máy bay không người lái và thế giới bên ngoài; khiến nó không thể dựa vào các phương pháp điều hướng thông thường để xác định vị trí và hướng của nó.
Tuy nhiên, thách thức thường đi kèm với cơ hội. Đặc thù của môi trường đường hầm cũng thúc đẩy sự phát triển của công nghệ dẫn đường tự động không cần tín hiệu vệ tinh. Sự xuất hiện của công nghệ này không chỉ cho phép máy bay không người lái bay an toàn và chính xác trong đường hầm mà còn mang đến những khả năng mới trong việc kiểm tra, bảo trì đường hầm và cứu hộ khẩn cấp.

Một loạt các đường hầm.
Trong trường hợp không có tín hiệu vệ tinh, máy bay không người lái cần dựa vào sự hợp tác của nhiều công nghệ để đạt được khả năng điều hướng tự động. Một mặt, các “xúc tu” vô hình của máy bay không người lái - nhiều loại cảm biến có độ chính xác cao, mở rộng đến các góc của đường hầm; phần còn lại là "bộ não" của máy bay không người lái - hệ thống hoạch định đường đi tiên tiến dựa trên thuật toán. hệ thống thu được bằng trí tuệ nhân tạo và học sâu, nó có thể cảm nhận môi trường thông qua nhiều dữ liệu khác nhau được thu thập bởi các "xúc tu" và tính toán đường đi tốt nhất, từ đó điều khiển máy bay không người lái hoàn thành việc điều hướng tự động.

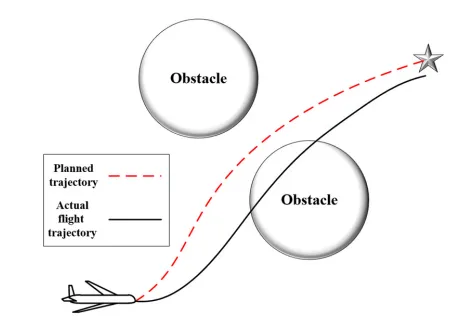
Máy bay không người lái di chuyển xung quanh chướng ngại vật để đến được vị trí mong muốn.

Cấu trúc phức tạp của máy bay không người lái.
Hệ thống dẫn đường quán tính là một "xúc tu" rất quan trọng. Nó giống như "bậc thầy trí nhớ" của máy bay không người lái . Bằng cách đo gia tốc và vận tốc góc, nó có thể tính toán những thay đổi về vị trí, tốc độ và tư thế của máy bay không người lái. Nhưng có một điểm yếu chết người trong việc điều hướng quán tính, đó là các lỗi tích lũy theo thời gian, do đó cần phải hiệu chỉnh và hiệu chỉnh liên tục.
Điều hướng địa từ giống như "la bàn" của máy bay không người lái. Từ trường của Trái đất có những đặc điểm riêng biệt ở các vị trí khác nhau. Bằng cách đo cường độ và hướng của từ trường, máy bay không người lái có thể so sánh nó với cơ sở dữ liệu địa từ được thiết lập sẵn để có được thông tin vị trí của chính nó. Tuy nhiên, môi trường địa từ dễ bị nhiễu bởi các vật kim loại xung quanh nên độ chính xác và độ tin cậy của nó cũng có những hạn chế nhất định.
Công nghệ dẫn đường lidar được ví như “đôi mắt” của drone. Nó có thể phát ra các chùm tia laser xung quanh và xây dựng mô hình ba chiều của môi trường xung quanh bằng cách đo thời gian phản xạ của chùm tia laser. Với mô hình này, máy bay không người lái có thể tránh chướng ngại vật một cách chính xác và lập kế hoạch đường bay an toàn. Tuy nhiên, phạm vi và độ phân giải của lidar cũng bị ảnh hưởng bởi các yếu tố môi trường.
Phép đo hình ảnh trực quan giống như “bộ nhớ hình ảnh” của máy bay không người lái. Bằng cách phân tích những thay đổi về điểm đặc trưng trong các hình ảnh được chụp liên tục, máy bay không người lái có thể tính toán thông tin chuyển động của chính nó và hỗ trợ ước tính vị trí và thái độ. Tuy nhiên, trong các đường hầm có ánh sáng yếu, hiệu suất đo thị giác bị ảnh hưởng rất nhiều.
Để khắc phục những thiếu sót của công nghệ điều hướng đơn, công nghệ tổng hợp đa cảm biến đã ra đời theo yêu cầu của thời đại. Nó tích hợp và phân tích dữ liệu từ nhiều cảm biến khác nhau như điều hướng quán tính, điều hướng địa từ, lidar và đo hình ảnh trực quan, phát huy tối đa lợi thế của từng cảm biến và mở rộng các "xúc tu" vô hình ra xa hơn để đạt được điều hướng chính xác và đáng tin cậy hơn.

Cấu trúc phức tạp của mạng nơ ron tích chập chuỗi thời gian
Trong những năm gần đây, nhiều loại cảm biến "có độ chính xác cao" tiếp tục phát triển, chẳng hạn như hệ thống dẫn đường quán tính, hệ thống định vị địa từ, công nghệ dẫn đường lidar, đo hình ảnh trực quan, v.v., khiến máy bay không người lái dường như đã mọc ra vô số "xúc tu" và những cảm biến này. Các “xúc tu” có thể nhìn, nghe, ghi nhớ, cảm nhận và có thể khám phá rõ ràng mọi ngóc ngách của đường hầm.
Hệ thống dẫn đường quán tính là một "xúc tu" rất quan trọng. Nó giống như "bậc thầy trí nhớ" của máy bay không người lái. Bằng cách đo gia tốc và vận tốc góc, nó có thể tính toán những thay đổi về vị trí, tốc độ và tư thế của máy bay không người lái. Nhưng có một điểm yếu chết người trong việc điều hướng quán tính, đó là các lỗi tích lũy theo thời gian, do đó cần phải hiệu chỉnh và hiệu chỉnh liên tục.
Điều hướng địa từ giống như "la bàn" của máy bay không người lái. Từ trường của Trái đất có những đặc điểm riêng biệt ở các vị trí khác nhau. Bằng cách đo cường độ và hướng của từ trường, máy bay không người lái có thể so sánh nó với cơ sở dữ liệu địa từ được thiết lập sẵn để có được thông tin vị trí của chính nó. Tuy nhiên, môi trường địa từ dễ bị nhiễu bởi các vật kim loại xung quanh nên độ chính xác và độ tin cậy của nó cũng có những hạn chế nhất định.
Công nghệ dẫn đường lidar được ví như “đôi mắt” của drone. Nó có thể phát ra các chùm tia laser xung quanh và xây dựng mô hình ba chiều của môi trường xung quanh bằng cách đo thời gian phản xạ của chùm tia laser. Với mô hình này, máy bay không người lái có thể tránh chướng ngại vật một cách chính xác và lập kế hoạch đường bay an toàn. Tuy nhiên, phạm vi và độ phân giải của lidar cũng bị ảnh hưởng bởi các yếu tố môi trường.
Phép đo hình ảnh trực quan giống như “bộ nhớ hình ảnh” của máy bay không người lái. Bằng cách phân tích những thay đổi về điểm đặc trưng trong các hình ảnh được chụp liên tục, máy bay không người lái có thể tính toán thông tin chuyển động của chính nó và hỗ trợ ước tính vị trí và thái độ. Tuy nhiên, trong các đường hầm có ánh sáng yếu, hiệu suất đo thị giác bị ảnh hưởng rất nhiều.
Để khắc phục những thiếu sót của công nghệ điều hướng đơn, công nghệ tổng hợp đa cảm biến đã ra đời theo yêu cầu của thời đại. Nó tích hợp và phân tích dữ liệu từ nhiều cảm biến khác nhau như điều hướng quán tính, điều hướng địa từ, lidar và đo hình ảnh trực quan, phát huy tối đa lợi thế của từng cảm biến và mở rộng các "xúc tu" vô hình ra xa hơn để đạt được điều hướng chính xác và đáng tin cậy hơn.

Các bước huấn luyện thuật toán
Quá trình này tương tự như cách suy nghĩ của người lái xe khi lái xe. Con người sẽ đưa ra quyết định điều hướng dựa trên tốc độ phương tiện hiện tại, điều kiện giao thông và điểm đến, đồng thời mạng lưới thần kinh sẽ sử dụng trạng thái của máy bay không người lái làm đầu vào để dự đoán quỹ đạo bay tốt nhất. Những dự báo này không chỉ dựa trên tình trạng hiện tại mà còn tính đến dữ liệu lịch sử chuyến bay thông qua các mô hình chuỗi thời gian, từ đó nâng cao tính chính xác và ổn định của việc ra quyết định.
Sau khi mạng lưới thần kinh đưa ra hướng dẫn, máy bay không người lái sẽ điều chỉnh quỹ đạo bay dựa trên những dự đoán này để ứng phó linh hoạt với các trường hợp khẩn cấp trong môi trường phức tạp. Ví dụ, khi đối mặt với những chướng ngại vật bất ngờ, mạng lưới thần kinh có thể phản ứng nhanh chóng và tránh chướng ngại vật bằng cách điều chỉnh đường bay. So với các phương pháp lập kế hoạch đường đi truyền thống, hệ thống dựa trên trí tuệ nhân tạo này có thể dự đoán các đặc tính động của máy bay không người lái chính xác hơn, giúp quỹ đạo bay của máy bay không người lái mượt mà và an toàn hơn.

Từ minh họa "hướ
ng dẫn" đến "hành động".
Máy bay không người lái có thể mang theo nhiều thiết bị phát hiện khác nhau, chẳng hạn như camera độ phân giải cao, cảm biến hồng ngoại, v.v., đồng thời có thể phát hiện nhanh chóng và toàn diện tính toàn vẹn của cấu trúc, khuyết tật bề mặt, điều kiện vận hành thiết bị, v.v. của đường hầm. Ví dụ, khi phát hiện các vết nứt trên tường bên trong của đường hầm, máy bay không người lái có thể xác định chính xác vị trí và kích thước của vết nứt, đồng thời truyền dữ liệu liên quan đến công nhân trong thời gian thực.
Trong lĩnh vực cứu hộ khẩn cấp, khi xảy ra tai nạn trong đường hầm, máy bay không người lái có thể nhanh chóng vào hiện trường và thu được hình ảnh cũng như thông tin môi trường của hiện trường, cung cấp cho lực lượng cứu hộ những thông tin trực tiếp có giá trị. Nó có thể giúp xác định vị trí của những người bị mắc kẹt, đánh giá mức độ nghiêm trọng của vụ tai nạn và cung cấp cơ sở quan trọng để xây dựng kế hoạch cứu hộ.
Ngoài ra, trong quá trình xây dựng đường hầm, máy bay không người lái có thể theo dõi tiến độ và chất lượng xây dựng, phát hiện kịp thời các vấn đề và đưa ra điều chỉnh.
Bất chấp nhiều thách thức phía trước, tôi tin rằng với sự nỗ lực không ngừng nghỉ của các nhà khoa học, công nghệ này sẽ tiếp tục được cải tiến và phát triển, trở thành vũ khí đắc lực đảm bảo vận hành an toàn và hiệu quả các đường hầm và mang lại thuận tiện và an ninh cho cuộc sống của chúng ta.
Nguồn tham khảo:
[1]Liu Y, Wang H, Fan J, và những người khác. Lập kế hoạch quỹ đạo có tính khả thi cao cho UAV định hướng điều khiển: Phương pháp học sâu[J].
[2]Taha Elmokadem*1;Andrey V. Savkin1.A phương pháp điều hướng tự động không va chạm của UAV quadrotor trong môi trường giống như đường hầm không xác định[J].Robotica,2022,Vol.40(4): 835-861
Cảnh quay từ máy bay không người lái về một đường hầm nổi lên từ một ngọn núi và những chiếc ô tô chạy qua đó.
Đường hầm là những lối đi ngầm được con người tạo ra để vượt qua các chướng ngại vật, nhưng đối với máy bay không người lái, chúng là một môi trường đầy thách thức. Trước hết, ánh sáng cực kỳ thiếu và bóng tối bao trùm từng inch không gian, khiến các cảm biến thị giác dựa vào ánh sáng gần như bị "mù" thứ hai, cấu trúc bên trong của đường hầm rất phức tạp, với không gian hẹp, lối đi cong và nhiều chướng ngại vật khác nhau, chẳng hạn như giá đỡ, dây cáp, v.v., đã gây trở ngại rất lớn cho chuyến bay của máy bay không người lái, điều quan trọng nhất là thiếu tín hiệu vệ tinh, dường như đã cắt đứt “kết nối” giữa máy bay không người lái và thế giới bên ngoài; khiến nó không thể dựa vào các phương pháp điều hướng thông thường để xác định vị trí và hướng của nó.
Tuy nhiên, thách thức thường đi kèm với cơ hội. Đặc thù của môi trường đường hầm cũng thúc đẩy sự phát triển của công nghệ dẫn đường tự động không cần tín hiệu vệ tinh. Sự xuất hiện của công nghệ này không chỉ cho phép máy bay không người lái bay an toàn và chính xác trong đường hầm mà còn mang đến những khả năng mới trong việc kiểm tra, bảo trì đường hầm và cứu hộ khẩn cấp.
Những “xúc tu” và “bộ não” của máy bay không người lái
Một loạt các đường hầm.
Trong trường hợp không có tín hiệu vệ tinh, máy bay không người lái cần dựa vào sự hợp tác của nhiều công nghệ để đạt được khả năng điều hướng tự động. Một mặt, các “xúc tu” vô hình của máy bay không người lái - nhiều loại cảm biến có độ chính xác cao, mở rộng đến các góc của đường hầm; phần còn lại là "bộ não" của máy bay không người lái - hệ thống hoạch định đường đi tiên tiến dựa trên thuật toán. hệ thống thu được bằng trí tuệ nhân tạo và học sâu, nó có thể cảm nhận môi trường thông qua nhiều dữ liệu khác nhau được thu thập bởi các "xúc tu" và tính toán đường đi tốt nhất, từ đó điều khiển máy bay không người lái hoàn thành việc điều hướng tự động.
Máy bay không người lái di chuyển xung quanh chướng ngại vật để đến được vị trí mong muốn.
Drone "xúc tu"
Trong những năm gần đây, nhiều loại cảm biến "có độ chính xác cao" tiếp tục phát triển, chẳng hạn như hệ thống dẫn đường quán tính, hệ thống định vị địa từ, công nghệ dẫn đường lidar, đo hình ảnh trực quan, v.v., khiến máy bay không người lái dường như đã mọc ra vô số "xúc tu" và những cảm biến này. Các “xúc tu” có thể nhìn, nghe, ghi nhớ, cảm nhận và có thể khám phá rõ ràng mọi ngóc ngách của đường hầm.
Cấu trúc phức tạp của máy bay không người lái.
Hệ thống dẫn đường quán tính là một "xúc tu" rất quan trọng. Nó giống như "bậc thầy trí nhớ" của máy bay không người lái . Bằng cách đo gia tốc và vận tốc góc, nó có thể tính toán những thay đổi về vị trí, tốc độ và tư thế của máy bay không người lái. Nhưng có một điểm yếu chết người trong việc điều hướng quán tính, đó là các lỗi tích lũy theo thời gian, do đó cần phải hiệu chỉnh và hiệu chỉnh liên tục.
Điều hướng địa từ giống như "la bàn" của máy bay không người lái. Từ trường của Trái đất có những đặc điểm riêng biệt ở các vị trí khác nhau. Bằng cách đo cường độ và hướng của từ trường, máy bay không người lái có thể so sánh nó với cơ sở dữ liệu địa từ được thiết lập sẵn để có được thông tin vị trí của chính nó. Tuy nhiên, môi trường địa từ dễ bị nhiễu bởi các vật kim loại xung quanh nên độ chính xác và độ tin cậy của nó cũng có những hạn chế nhất định.
Công nghệ dẫn đường lidar được ví như “đôi mắt” của drone. Nó có thể phát ra các chùm tia laser xung quanh và xây dựng mô hình ba chiều của môi trường xung quanh bằng cách đo thời gian phản xạ của chùm tia laser. Với mô hình này, máy bay không người lái có thể tránh chướng ngại vật một cách chính xác và lập kế hoạch đường bay an toàn. Tuy nhiên, phạm vi và độ phân giải của lidar cũng bị ảnh hưởng bởi các yếu tố môi trường.
Phép đo hình ảnh trực quan giống như “bộ nhớ hình ảnh” của máy bay không người lái. Bằng cách phân tích những thay đổi về điểm đặc trưng trong các hình ảnh được chụp liên tục, máy bay không người lái có thể tính toán thông tin chuyển động của chính nó và hỗ trợ ước tính vị trí và thái độ. Tuy nhiên, trong các đường hầm có ánh sáng yếu, hiệu suất đo thị giác bị ảnh hưởng rất nhiều.
Để khắc phục những thiếu sót của công nghệ điều hướng đơn, công nghệ tổng hợp đa cảm biến đã ra đời theo yêu cầu của thời đại. Nó tích hợp và phân tích dữ liệu từ nhiều cảm biến khác nhau như điều hướng quán tính, điều hướng địa từ, lidar và đo hình ảnh trực quan, phát huy tối đa lợi thế của từng cảm biến và mở rộng các "xúc tu" vô hình ra xa hơn để đạt được điều hướng chính xác và đáng tin cậy hơn.
“Bộ não” của máy bay không người lái
Với sự phát triển nhanh chóng của các thuật toán lập kế hoạch đường đi và ra quyết định thông minh, máy bay không người lái đã dần phát triển "bộ não" và có thể tự điều hướng trong môi trường phức tạp. Lấy nghiên cứu gần đây làm ví dụ, các nhà khoa học đã phát triển một hệ thống lập kế hoạch đường đi tiên tiến dựa trên trí tuệ nhân tạo và học sâu, cho phép máy bay không người lái đối phó với những thách thức điều hướng trong môi trường phức tạp như đường hầm và rừng, đồng thời suy nghĩ như con người, dựa trên kinh nghiệm trong quá khứ. Lập kế hoạch một con đường phù hợp. Trong quá trình này, các mạng thần kinh, đặc biệt là Mạng thần kinh chuyển đổi chuỗi thời gian (TSCNN) , đóng một vai trò quan trọng.
Cấu trúc phức tạp của mạng nơ ron tích chập chuỗi thời gian
Trong những năm gần đây, nhiều loại cảm biến "có độ chính xác cao" tiếp tục phát triển, chẳng hạn như hệ thống dẫn đường quán tính, hệ thống định vị địa từ, công nghệ dẫn đường lidar, đo hình ảnh trực quan, v.v., khiến máy bay không người lái dường như đã mọc ra vô số "xúc tu" và những cảm biến này. Các “xúc tu” có thể nhìn, nghe, ghi nhớ, cảm nhận và có thể khám phá rõ ràng mọi ngóc ngách của đường hầm.
Hệ thống dẫn đường quán tính là một "xúc tu" rất quan trọng. Nó giống như "bậc thầy trí nhớ" của máy bay không người lái. Bằng cách đo gia tốc và vận tốc góc, nó có thể tính toán những thay đổi về vị trí, tốc độ và tư thế của máy bay không người lái. Nhưng có một điểm yếu chết người trong việc điều hướng quán tính, đó là các lỗi tích lũy theo thời gian, do đó cần phải hiệu chỉnh và hiệu chỉnh liên tục.
Điều hướng địa từ giống như "la bàn" của máy bay không người lái. Từ trường của Trái đất có những đặc điểm riêng biệt ở các vị trí khác nhau. Bằng cách đo cường độ và hướng của từ trường, máy bay không người lái có thể so sánh nó với cơ sở dữ liệu địa từ được thiết lập sẵn để có được thông tin vị trí của chính nó. Tuy nhiên, môi trường địa từ dễ bị nhiễu bởi các vật kim loại xung quanh nên độ chính xác và độ tin cậy của nó cũng có những hạn chế nhất định.
Công nghệ dẫn đường lidar được ví như “đôi mắt” của drone. Nó có thể phát ra các chùm tia laser xung quanh và xây dựng mô hình ba chiều của môi trường xung quanh bằng cách đo thời gian phản xạ của chùm tia laser. Với mô hình này, máy bay không người lái có thể tránh chướng ngại vật một cách chính xác và lập kế hoạch đường bay an toàn. Tuy nhiên, phạm vi và độ phân giải của lidar cũng bị ảnh hưởng bởi các yếu tố môi trường.
Phép đo hình ảnh trực quan giống như “bộ nhớ hình ảnh” của máy bay không người lái. Bằng cách phân tích những thay đổi về điểm đặc trưng trong các hình ảnh được chụp liên tục, máy bay không người lái có thể tính toán thông tin chuyển động của chính nó và hỗ trợ ước tính vị trí và thái độ. Tuy nhiên, trong các đường hầm có ánh sáng yếu, hiệu suất đo thị giác bị ảnh hưởng rất nhiều.
Để khắc phục những thiếu sót của công nghệ điều hướng đơn, công nghệ tổng hợp đa cảm biến đã ra đời theo yêu cầu của thời đại. Nó tích hợp và phân tích dữ liệu từ nhiều cảm biến khác nhau như điều hướng quán tính, điều hướng địa từ, lidar và đo hình ảnh trực quan, phát huy tối đa lợi thế của từng cảm biến và mở rộng các "xúc tu" vô hình ra xa hơn để đạt được điều hướng chính xác và đáng tin cậy hơn.
“Bộ não” của máy bay không người lái
Với sự phát triển nhanh chóng của các thuật toán lập kế hoạch đường đi và ra quyết định thông minh, máy bay không người lái đã dần phát triển "bộ não" và có thể tự điều hướng trong môi trường phức tạp. Lấy nghiên cứu gần đây làm ví dụ, các nhà khoa học đã phát triển một hệ thống lập kế hoạch đường đi tiên tiến dựa trên trí tuệ nhân tạo và học sâu, cho phép máy bay không người lái đối phó với những thách thức điều hướng trong môi trường phức tạp như đường hầm và rừng, đồng thời suy nghĩ như con người, dựa trên kinh nghiệm trong quá khứ. Lập kế hoạch một con đường phù hợp. Trong quá trình này, các mạng thần kinh, đặc biệt là Mạng thần kinh chuyển đổi chuỗi thời gian (TSCNN) , đóng một vai trò quan trọng.
Các bước huấn luyện thuật toán
Quá trình này tương tự như cách suy nghĩ của người lái xe khi lái xe. Con người sẽ đưa ra quyết định điều hướng dựa trên tốc độ phương tiện hiện tại, điều kiện giao thông và điểm đến, đồng thời mạng lưới thần kinh sẽ sử dụng trạng thái của máy bay không người lái làm đầu vào để dự đoán quỹ đạo bay tốt nhất. Những dự báo này không chỉ dựa trên tình trạng hiện tại mà còn tính đến dữ liệu lịch sử chuyến bay thông qua các mô hình chuỗi thời gian, từ đó nâng cao tính chính xác và ổn định của việc ra quyết định.
Sau khi mạng lưới thần kinh đưa ra hướng dẫn, máy bay không người lái sẽ điều chỉnh quỹ đạo bay dựa trên những dự đoán này để ứng phó linh hoạt với các trường hợp khẩn cấp trong môi trường phức tạp. Ví dụ, khi đối mặt với những chướng ngại vật bất ngờ, mạng lưới thần kinh có thể phản ứng nhanh chóng và tránh chướng ngại vật bằng cách điều chỉnh đường bay. So với các phương pháp lập kế hoạch đường đi truyền thống, hệ thống dựa trên trí tuệ nhân tạo này có thể dự đoán các đặc tính động của máy bay không người lái chính xác hơn, giúp quỹ đạo bay của máy bay không người lái mượt mà và an toàn hơn.
Từ minh họa "hướ
ng dẫn" đến "hành động".
Mở rộng các lĩnh vực ứng dụng
Công nghệ dẫn đường tự động không cần vệ tinh của máy bay không người lái trong đường hầm đã cho thấy triển vọng ứng dụng rộng rãi trong nhiều lĩnh vực. Về mặt kiểm tra và bảo trì đường hầm, các phương pháp kiểm tra thủ công truyền thống không những kém hiệu quả mà còn tiềm ẩn những rủi ro về an toàn.Máy bay không người lái có thể mang theo nhiều thiết bị phát hiện khác nhau, chẳng hạn như camera độ phân giải cao, cảm biến hồng ngoại, v.v., đồng thời có thể phát hiện nhanh chóng và toàn diện tính toàn vẹn của cấu trúc, khuyết tật bề mặt, điều kiện vận hành thiết bị, v.v. của đường hầm. Ví dụ, khi phát hiện các vết nứt trên tường bên trong của đường hầm, máy bay không người lái có thể xác định chính xác vị trí và kích thước của vết nứt, đồng thời truyền dữ liệu liên quan đến công nhân trong thời gian thực.
Trong lĩnh vực cứu hộ khẩn cấp, khi xảy ra tai nạn trong đường hầm, máy bay không người lái có thể nhanh chóng vào hiện trường và thu được hình ảnh cũng như thông tin môi trường của hiện trường, cung cấp cho lực lượng cứu hộ những thông tin trực tiếp có giá trị. Nó có thể giúp xác định vị trí của những người bị mắc kẹt, đánh giá mức độ nghiêm trọng của vụ tai nạn và cung cấp cơ sở quan trọng để xây dựng kế hoạch cứu hộ.
Ngoài ra, trong quá trình xây dựng đường hầm, máy bay không người lái có thể theo dõi tiến độ và chất lượng xây dựng, phát hiện kịp thời các vấn đề và đưa ra điều chỉnh.
“Thắp sáng” đường hầm
Khi công nghệ cảm biến tiếp tục phát triển, máy bay không người lái sẽ cảm nhận được những thay đổi môi trường tinh tế hơn và cung cấp dữ liệu điều hướng chính xác hơn. Việc tích hợp trí tuệ nhân tạo và học máy sẽ giúp hệ thống định vị thông minh và thích ứng hơn, có khả năng đối phó tốt hơn với môi trường đường hầm phức tạp và hay thay đổi. Đồng thời, sự kết hợp với công nghệ truyền thông 5G sẽ thực hiện việc truyền dữ liệu tốc độ cao, độ trễ thấp giữa máy bay không người lái và trung tâm điều khiển mặt đất, cải thiện hơn nữa độ chính xác và độ tin cậy của điều hướng.Bất chấp nhiều thách thức phía trước, tôi tin rằng với sự nỗ lực không ngừng nghỉ của các nhà khoa học, công nghệ này sẽ tiếp tục được cải tiến và phát triển, trở thành vũ khí đắc lực đảm bảo vận hành an toàn và hiệu quả các đường hầm và mang lại thuận tiện và an ninh cho cuộc sống của chúng ta.
Nguồn tham khảo:
[1]Liu Y, Wang H, Fan J, và những người khác. Lập kế hoạch quỹ đạo có tính khả thi cao cho UAV định hướng điều khiển: Phương pháp học sâu[J].
[2]Taha Elmokadem*1;Andrey V. Savkin1.A phương pháp điều hướng tự động không va chạm của UAV quadrotor trong môi trường giống như đường hầm không xác định[J].Robotica,2022,Vol.40(4): 835-861